Decoupling stochasticity via latent variables#
import matplotlib.pyplot as plt
import numpy as np
import torch; torch.set_default_dtype(torch.double)
from streaming_flow_policy.all import StreamingFlowPolicyLatent
from streaming_flow_policy.toy.plot_latent import (
plot_probability_density_a,
plot_probability_density_z,
plot_probability_density_and_streamlines_a,
plot_probability_density_and_streamlines_z,
plot_probability_density_with_static_trajectories,
)
from pydrake.all import (
CompositeTrajectory,
PiecewisePolynomial,
Trajectory,
)
# Set seed
np.random.seed(0)
Set hyperparameters#
σ0 = 0.001
σ1 = 0.05
k = 2.5
def demonstration_traj_right() -> Trajectory:
"""
Returns a trajectory x(t) that is 0 for 0 < t < 0.25, and a sine curve
for 0.25 < t < 1 that starts at 0 and ends at 0.75.
"""
piece_1 = PiecewisePolynomial.FirstOrderHold(
breaks=[0, 0.25],
samples=[[0, 0]],
)
piece_2 = PiecewisePolynomial.CubicWithContinuousSecondDerivatives(
breaks=[0.25, 0.50, 0.75, 1.0],
samples=[[0.00, 0.62, 0.70, 0.5]],
sample_dot_at_start=[[0.0]],
sample_dot_at_end=[[-0.7]],
)
return CompositeTrajectory([piece_1, piece_2])
def demonstration_traj_left() -> Trajectory:
"""
Returns a trajectory x(t) that is 0 for 0 < t < 0.25, and a sine curve
for 0.25 < t < 1 that starts at 0 and ends at 0.75.
"""
piece_1 = PiecewisePolynomial.FirstOrderHold(
breaks=[0, 0.25],
samples=[[0, 0]],
)
piece_2 = PiecewisePolynomial.CubicWithContinuousSecondDerivatives(
breaks=[0.25, 0.50, 0.75, 1.0],
samples=[[0.00, -0.62, -0.70, -0.5]],
sample_dot_at_start=[[0.0]],
sample_dot_at_end=[[0.7]],
)
return CompositeTrajectory([piece_1, piece_2])
traj_right = demonstration_traj_right()
traj_left = demonstration_traj_left()
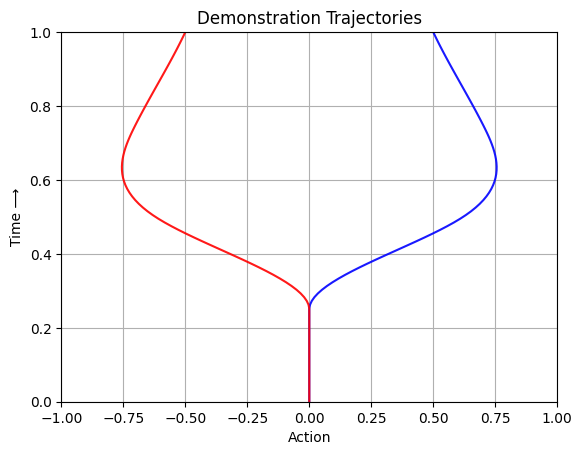
Plot demonstration trajectories#
"""
Plot demonstration trajectory on x-y plane where x axis is the state in [-1, 1]
and y axis is the time in [0, 1].
"""
times = np.linspace(0, 1, 100)
plt.plot(traj_right.vector_values(times)[0], times, color='blue', alpha=0.9)
plt.plot(traj_left.vector_values(times)[0], times, color='red', alpha=0.9)
plt.xlim(-1, 1)
plt.ylim(0, 1)
plt.xlabel('Action')
plt.ylabel('Time ⟶')
plt.title('Demonstration Trajectories')
plt.grid(True)
plt.show()
Notation#
Symbol |
Space |
Meaning |
|---|---|---|
\(t\) |
\([0, 1]\) |
Time |
\(a\) |
\(\mathcal{A}\) |
Action |
\(z\) |
\(\mathcal{A}\) |
Latent variable |
\(x = (a, z)\) |
\(\mathcal{A}^2\) |
State |
\(v\) |
\(T\mathcal{A}\) |
Velocity |
\(h\) |
\(\mathcal{H}\) |
Observation history |
\(v_\theta(a, z, t \mid h)\) |
\(T\mathcal{A}^2\) |
Learned flow policy |
\(\xi \sim \mathcal{D}\) |
\([0, 1] \rightarrow \mathcal{A}\) |
Random variable for demonstration trajectories |
\(\xi(t)\) |
\(\mathcal{A}\) |
Action in the demonstration at time \(t\) |
\(\dot{\xi}(t)\) |
\(T\mathcal{A}\) |
Velocity in the demonstration at time \(t\) |
In this notebook, \(x \equiv a\).
Conditional flow#
fp = StreamingFlowPolicyLatent(dim=1, trajectories=[traj_right], prior=[1.0], σ0=σ0, σ1=σ1, k=k)
Given \(\xi \sim \mathcal{D}\) with associated observation history \(h\), we extend the state space using a latent variable \(z \in \mathbb{C}\). We define the initial distribution at \(t = 0\) as follows.
Initial sample
We use two hyperparameters \(\sigma_0\) and \(\sigma_1\) to represent how peaked the distribution should be at \(t = 0\) and \(t = 1\) respectively, where \(\sigma_1 \geq \sigma_0\). For convenience, define the “residual standard deviation” \(\sigma_r = \sqrt{\sigma_1^2 - \sigma_0^2 e^{-2k}}\). For an initial sample \((a_0, z_0)\), we define the flow trajectory as:
Flow trajectory
The flow is a diffeomorphism from \(\mathbb{C}^2\) to \(\mathbb{C}^2\) for every \(t \in [0, 1]\).
Note that \(a(0 \mid \xi, a_0, z_0) = a_0\) and \(z(0 \mid \xi, a_0, z_0) = z_0\), so the diffeomorphism is identity at \(t=0\). The marginal distribution at \(t=1\) for \(a\) and \(z\) is given by \(a(t \mid \xi) \sim \mathcal{N}(\xi(1), \sigma_1^2)\) and \(z(t \mid \xi) \sim \mathcal{N}(\xi(1), \sigma_1^2)\).
Since \((a, z)\) at time \(t\) is a linear transformation of \((a_0, z_0)\), the joint distribution of \((a, z)\) at every timestep is a Gaussian given by:
Joint distribution of (a, z) at each timestep
Note that \(\mu_0 = \begin{bmatrix}\xi(0)\\0 \end{bmatrix}\) and \(\Sigma_0 = \begin{bmatrix} \sigma_0^2 & 0 \\ 0 & 1\end{bmatrix}\).
At time \(t\), the velocity of the trajectory starting from \((a_0, z_0)\) is:
The flow induces a velocity field at every \((a, z, t)\). The conditional velocity field \(v_\theta(a, z, t \mid h)\) by first inverting the flow transformation in Eq (1, 2), and plugging that into Eq. (3, 4):
First, given \(a = a(t \mid \xi, a_0, z_0)\) and \(z = z(t \mid \xi, a_0, z_0)\), invert the flow to compute \(a_0\) and \(z_0\).
Then, plug this into Eq. (3, 4) to compute the conditional velocity field:
Conditional velocity field
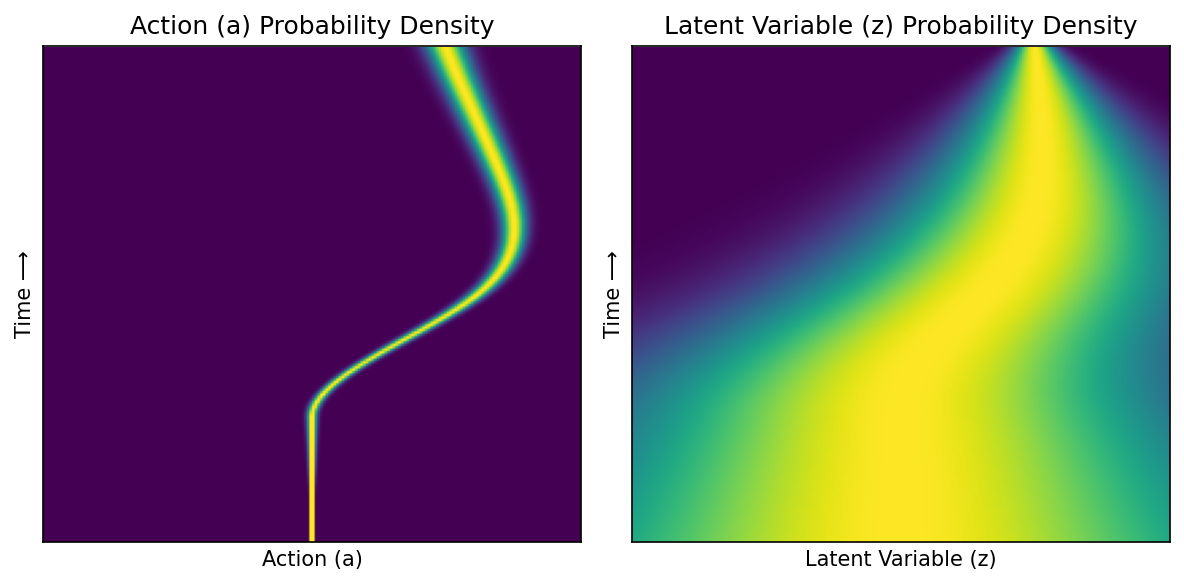
Plot conditional probability path of right trajectory#
fig = plt.figure(figsize=(8, 4), dpi=150)
xs = torch.linspace(-1, 1, 200)
ts = torch.linspace(0, 1, 200)
ts, xs = torch.meshgrid(ts, xs, indexing='ij') # (T, X)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_a(fp, ts, xs, ax1)
plot_probability_density_z(fp, ts, xs, ax2)
ax1.set_title('Action (a) Probability Density', size='large')
ax2.set_title('Latent Variable (z) Probability Density', size='large')
ax1.set_xlabel('Action (a)')
ax1.set_ylabel('Time ⟶')
ax2.set_xlabel('Latent Variable (z)')
ax2.set_ylabel('Time ⟶')
plt.tight_layout()
plt.show()
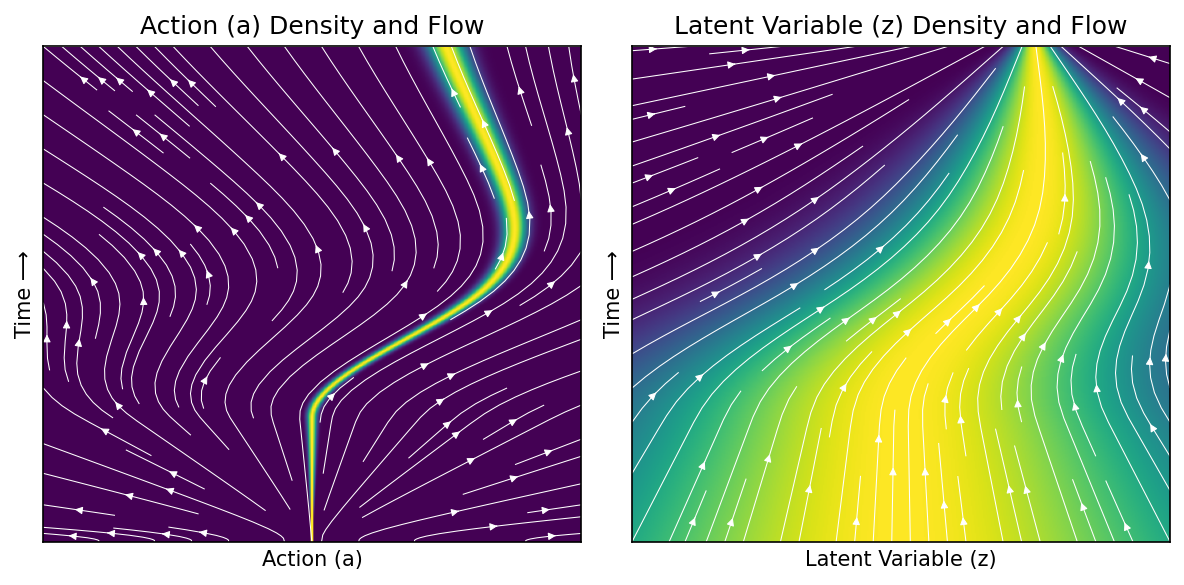
Plot conditional velocity field of right trajectory, taking expectation over other variable#
fig = plt.figure(figsize=(8, 4), dpi=150)
xs = torch.linspace(-1, 1, 200)
ts = torch.linspace(0, 1, 200)
ts, xs = torch.meshgrid(ts, xs, indexing='ij') # (T, X)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_and_streamlines_a(fp, ax1)
plot_probability_density_and_streamlines_z(fp, ax2)
ax1.set_title('Action (a) Density and Flow', size='large')
ax2.set_title('Latent Variable (z) Density and Flow', size='large')
ax1.set_xlabel('Action (a)')
ax1.set_ylabel('Time ⟶')
ax2.set_xlabel('Latent Variable (z)')
ax2.set_ylabel('Time ⟶')
plt.tight_layout()
plt.show()
Plot trajectories under conditional flow of right trajectory#
a_starts = [0.0] * 10
z_starts_pos = np.abs(np.random.randn(5))
z_starts_neg = -np.abs(np.random.randn(5))
z_starts = sorted(np.concatenate([z_starts_neg, z_starts_pos]))
colors = ['red'] * 5 + ['red'] * 5
fig = plt.figure(figsize=(8, 4), dpi=150)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_with_static_trajectories(
fp, ax1, ax2, a_starts, z_starts, colors, num_points_x=400,
)
plt.show()
Marginal flow#
fp = StreamingFlowPolicyLatent(dim=1, trajectories=[traj_right, traj_left], prior=[0.5, 0.5], σ0=σ0, σ1=σ1, k=k)
Training#
Flow matching loss:
Sample trajectory from dataset \(\xi \sim \mathcal{D}\).
Sample \(a_0 \sim \mathcal{N}(\xi(0), \sigma_0^2)\).
Sample \(z_0 \sim \mathcal{N}(0, I)\).
Sample \(t \sim \text{Uniform}([0, 1])\).
Compute \(a = a(t \mid \xi, a_0, z_0)\) and \(z = z(t \mid \xi, a_0, z_0)\) using Eq. (1, 2).
Compute conditional velocity field \(v_\theta(a, z, t \mid h)\) using Eq. (5, 6).
Compute L2 loss: \(\| v_\theta(a, z, t \mid h) - v(a, z, t \mid \xi) \|_2^2\).
Flow matching theorem#
If \(v^*(x, t \mid h)\) is the optimal velocity field that minimizes the flow matching loss, then the marginal distributions \(\mathbb{P}^*(x \mid t, h)\) induced by \(v^*\) at every time \(t\) is the “average” of the conditional flow distributions \(\mathbb{P}(x \mid t, \xi)\) averaged over the training distribution.
where here, \(x = (a, z)\).
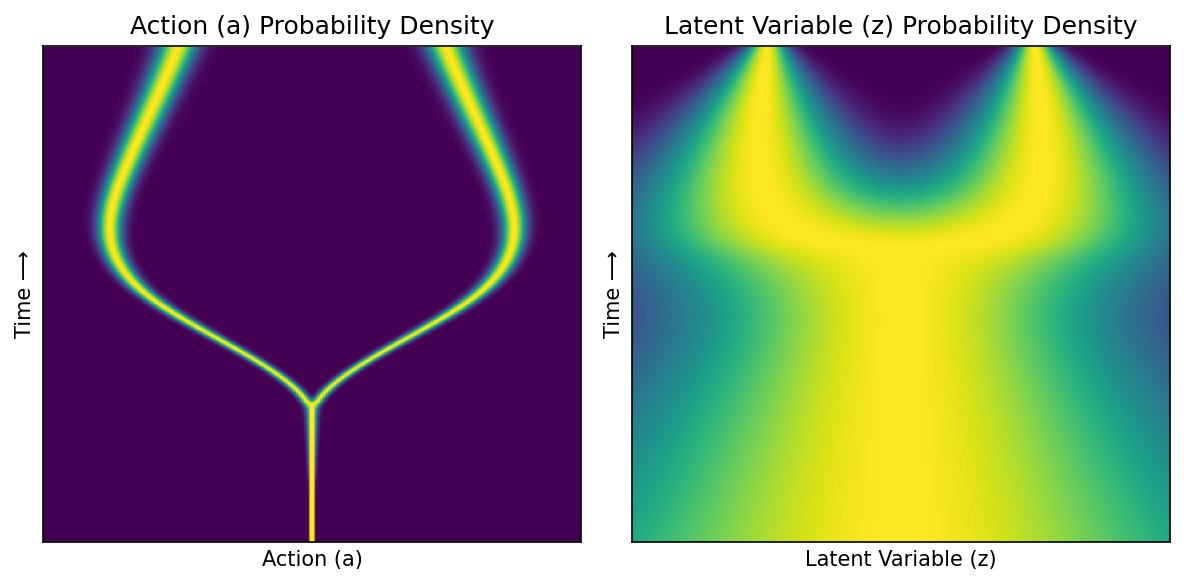
Plot marginal probability path#
fig = plt.figure(figsize=(8, 4), dpi=150)
xs = torch.linspace(-1, 1, 200) # (X,)
ts = torch.linspace(0, 1, 400) # (T,)
ts, xs = torch.meshgrid(ts, xs, indexing='ij') # (T, X)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_a(fp, ts, xs, ax1)
plot_probability_density_z(fp, ts, xs, ax2)
ax1.set_title('Action (a) Probability Density', size='large')
ax2.set_title('Latent Variable (z) Probability Density', size='large')
ax1.set_xlabel('Action (a)')
ax1.set_ylabel('Time ⟶')
ax2.set_xlabel('Latent Variable (z)')
ax2.set_ylabel('Time ⟶')
plt.tight_layout()
plt.show()
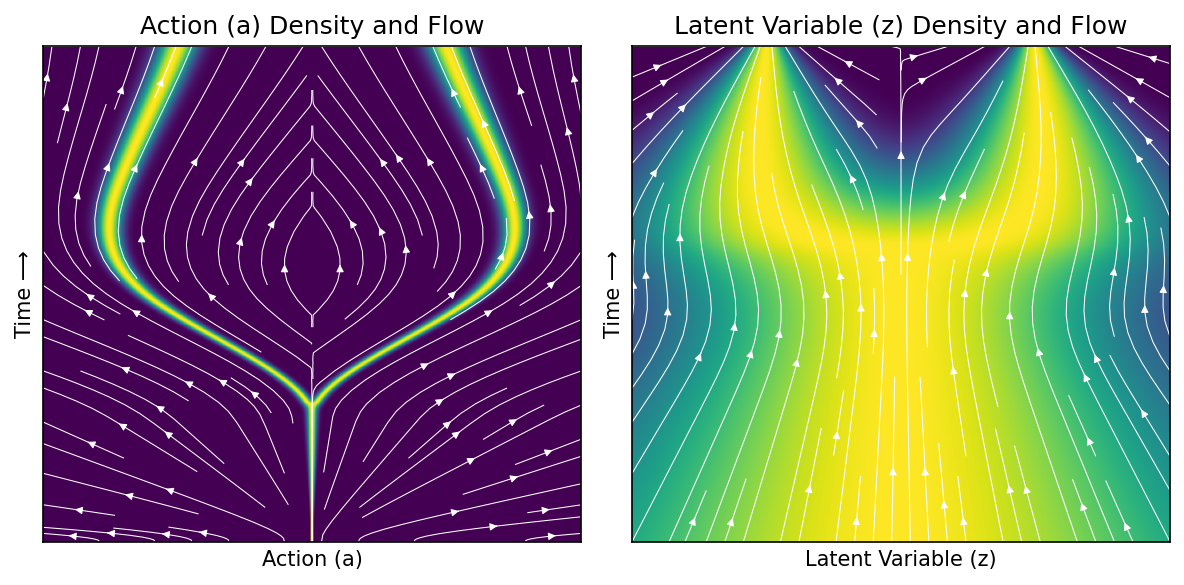
Plot marginal velocity field, taking expectation over other variable#
fig = plt.figure(figsize=(8, 4), dpi=150)
xs = torch.linspace(-1, 1, 200)
ts = torch.linspace(0, 1, 200)
ts, xs = torch.meshgrid(ts, xs, indexing='ij') # (T, X)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_and_streamlines_a(fp, ax1)
plot_probability_density_and_streamlines_z(fp, ax2)
ax1.set_title('Action (a) Density and Flow', size='large')
ax2.set_title('Latent Variable (z) Density and Flow', size='large')
ax1.set_xlabel('Action (a)')
ax1.set_ylabel('Time ⟶')
ax2.set_xlabel('Latent Variable (z)')
ax2.set_ylabel('Time ⟶')
plt.tight_layout()
plt.show()
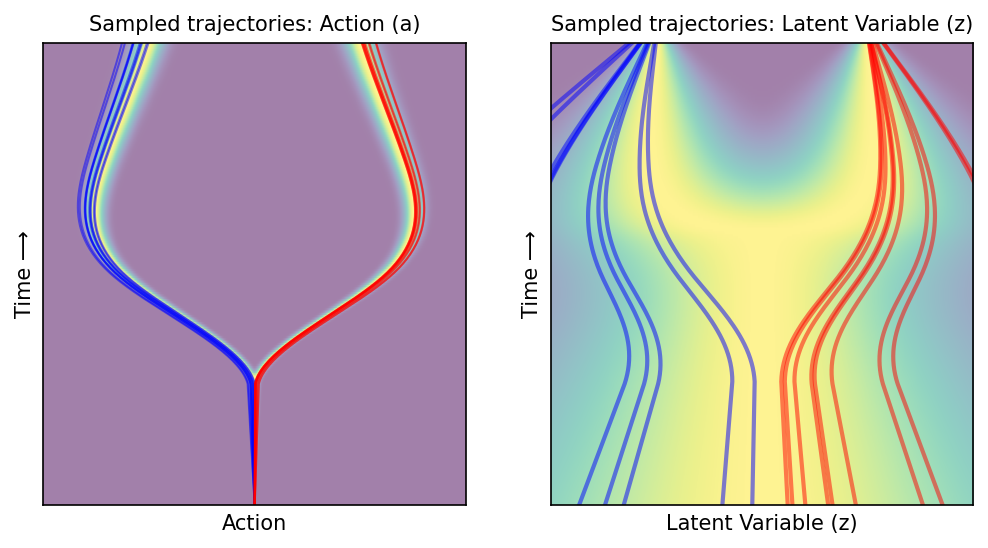
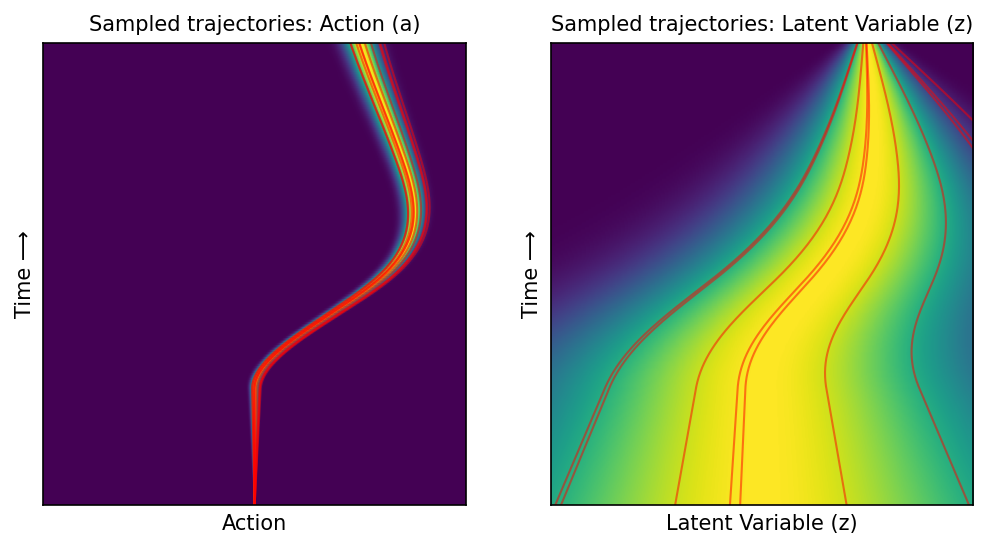
Plot trajectories under marginal flow#
a_starts = [0.0] * 20
z_starts_pos = np.abs(np.random.randn(10))
z_starts_neg = -np.abs(np.random.randn(10))
z_starts = sorted(np.concatenate([z_starts_pos, z_starts_neg]))
colors = ['blue'] * 10 + ['red'] * 10
fig = plt.figure(figsize=(8, 4), dpi=150)
gs = fig.add_gridspec(1, 2, width_ratios=[1, 1])
ax1 = fig.add_subplot(gs[0])
ax2 = fig.add_subplot(gs[1])
plot_probability_density_with_static_trajectories(
fp, ax1, ax2, a_starts, z_starts, colors,
heatmap_alpha=0.5,
linewidth_a=1, linewidth_z=2,
num_points_x=400,
)
plt.show()