What is a Safety Envelope?
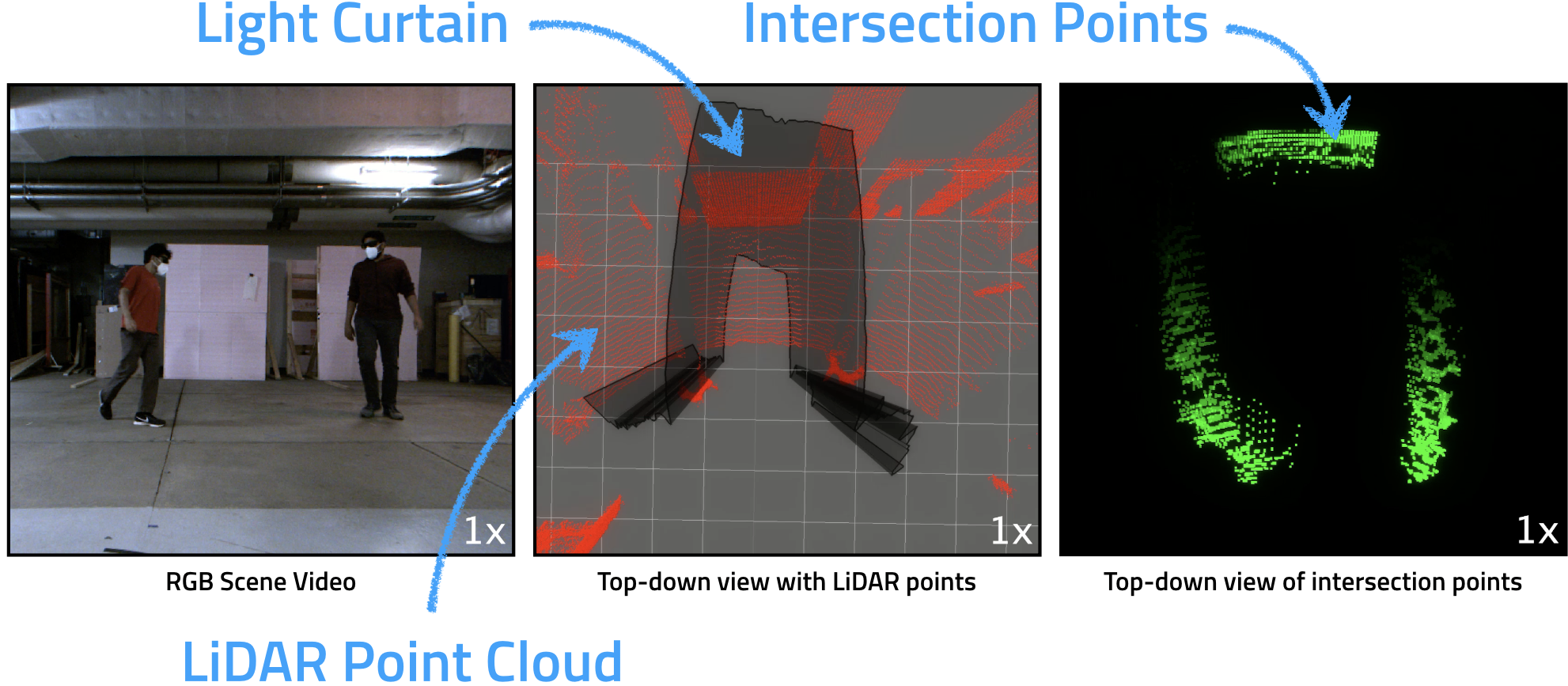
The safety envelope is an imaginary, vertically ruled surface that separates the robot from all obstacles in its environment. The region between the envelope and the robot is free space and is safe for the robot to occupy without colliding with any objects. Furthermore, the safety envelope "hugs" the closest object surfaces to maximize the amount of free space between the robot and the envelope. As long as the robot never intersects the safety envelope, it is guaranteed to not collide with any obstacle!